
Vision
The Fluids & Adaptive Structures (FASt) Lab aims to realize intelligent structures that think and respond to their fluid environment by turning flexibility into function. We achieve this by embodying actuation, sensing, processing, and control directly into a flexible structure.
Our ongoing research includes:
- Soft robotic swimmers inspired by biology that can better explore our oceans
- Embodying intelligence into vibrating aerospace structures to sense & process the flow and enable faster vehicle response
- Ocean wave energy converters that flex with the waves and turn the energy of the waves into electricity
Robots that Swim – Soft Swimming Robots Inspired by Biology
Using biology as an inspiration, we are developing soft robotic swimmers that can better explore our oceans: from the waves of the coast to the crushing pressures of the deep.
We’re designing the soft robotic swimmer so that it can adapt between swimming modes stiffening its body to change speeds and control its muscles to accelerate
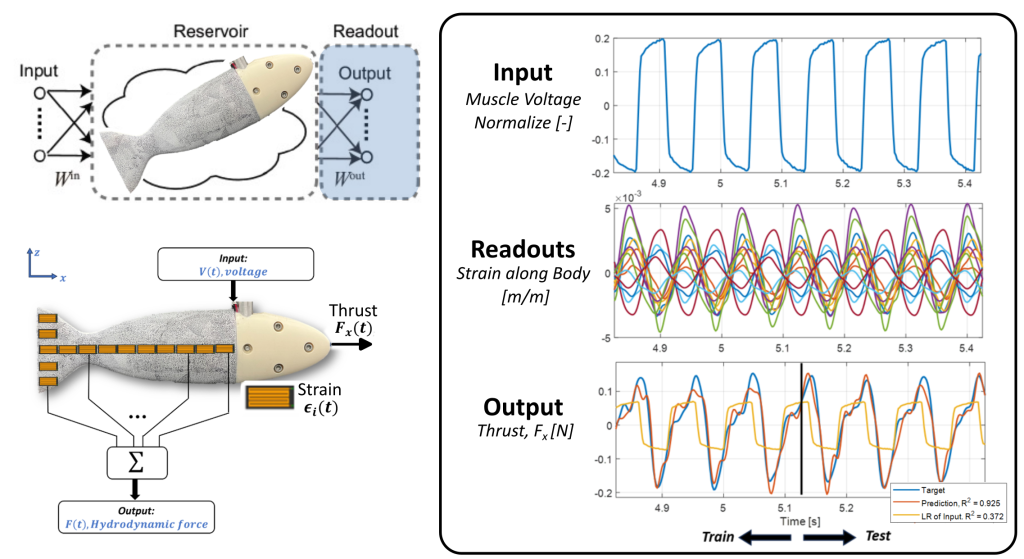
Using a Fish (Robot) as a Computer – Embodying Computation into the Body of a Soft Robotic Swimmer
Using the technique physical reservoir computing, we’re working to embody computation into the physical body of a swimming robot which will free-up the onboard computers for mission critical tasks like communication and data collection.
We’re using the soft robot’s nonlinear dynamics as a mechanical neural network, and letting the fish use its own body to perform proprioception (sense of body position) and calculate it’s own thrust
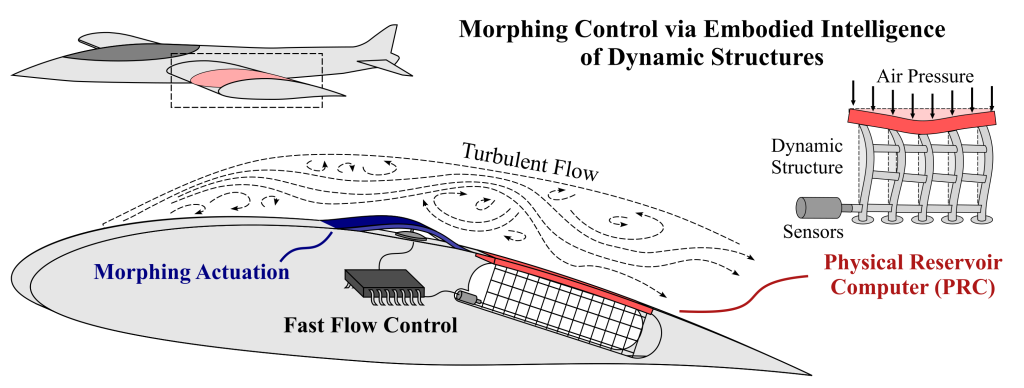
Sensing the Flow – Aerospace Structures that Sense & Process Aerodynamics
We’re working to use a vehicle’s own structure as a computer. The structural dynamics will sense, process, and respond to the flow to enable more agile aerospace vehicles.
This work is part of the AEROMORPH Center of Excellence between Florida State and University of Florida (sponsored by the U.S. Air Force) which aims to develop integrated sense, assess, and response framework for high speed aerospace morphing
COE Website: https://fcaap.fsu.edu/aeromorph
Publications
- Musgrave, Patrick F., and Charles M. Tenney. “Higher resonances improve the swimming performance of flexible bio-inspired propulsors.” Journal of Fluids and Structures 139 (2025): 104433. https://doi.org/10.1016/j.jfluidstructs.2025.104433
- He, Shan, and Patrick F. Musgrave. “The role of nonlinearity, dimensionality, memory, and input on a mechanical oscillator reservoir computer.” Neurocomputing 652 (2025): 131158. https://doi.org/10.1016/j.neucom.2025.131158
- Soto, Kevin, et al. “Improving Swimming Performance in Soft Robotic Fish with Distributed Muscles and Embedded Kinematic Sensing.” 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft). IEEE, 2025. https://doi.org/10.1109/ROBOSOFT63089.2025.11020876
- He, Shan, and Patrick Musgrave. “Physical Reservoir Computing on a Soft Bio-inspired Swimmer.” Neural Networks (2024): 106766. https://doi.org/10.1016/j.neunet.2024.106766
- Hess, Isabel, and Patrick F. Musgrave. “A continuum soft robotic trout with embedded HASEL actuators: Design, fabrication, and swimming kinematics.” Smart Materials and Structures (2024). https://doi.org/10.1088/1361-665X/ad79ce
- Hess, Isabel, et al. “Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers.” Energies 17.23 (2024): 6130. https://doi.org/10.3390/en17236130
- Perilla Rodriguez, Miguel, and Patrick F. Musgrave. “The role of local active stiffness on the natural frequency of a flexible propulsor.” Smart Materials and Structures (2024). https://doi.org/10.1088/1361-665X/ad9a2c
- Musgrave, P. F. (2021). Electro-hydro-elastic modeling of Structure-Borne Traveling Waves and their application to aquatic swimming motions. Journal of Fluids and Structures, 102, 103230. https://doi.org/10.1016/j.jfluidstructs.2021.103230
- Musgrave, P. F., Albakri, M. I., & Phoenix, A. A. (2021). Guidelines and procedure for tailoring high-performance, steady-state traveling waves for propulsion and solid-state motion. Smart Materials and Structures, 30(2), 025013. https://doi.org/10.1088/1361-665X/abd3d7
- Musgrave, P. F., Albakri, M. I., Tenney, C, & Tarazaga, P. (2020). Generating and tailoring Structure-Borne Traveling Waves on two-dimensional surfaces. Journal of Sound and Vibration, 115417. https://doi.org/10.1016/j.jsv.2020.115417