- The FASt Lab is looking for PhD StudentsThe Fluids and Adaptive Structures Lab (FASt) at the University of Florida is currently looking to hire PhD students interested in the adaptive structures, embedded smart materials, and fluid-structure interactions. Potential projects are in the area of 1) Bio-inspired Underwater Robotics and 2) Morphological Computation of Aeroelastic Structures.
Vision
The mission of the FASt Lab is to investigate and design adaptive structures that are dynamically coupled to their fluid environment. Essentially, we want to understand morphing and flexible structures operating underwater and in air.
Application areas include: bio-inspired underwater propulsion (robotic fish), underwater robotics, embedded sensing, and compliant aero structures (such as HALE aircraft: high altitude, long endurance)
This research is multi-physical and crosses the areas of structures, hydro/aerodynamics, mechatronics, controls, and smart materials. We use a combination of experimentation, analytic and reduced-order modeling, and optimization techniques.
Projects
Bio-inspired Underwater Propulsion
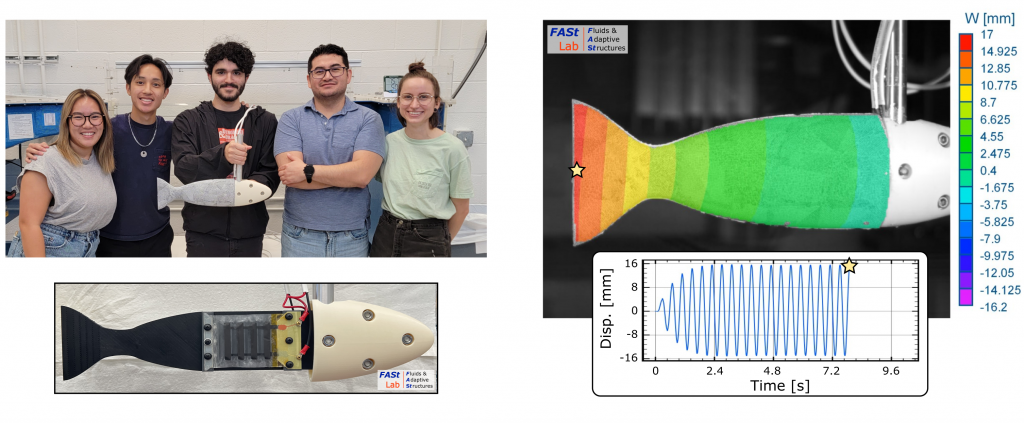
Biological swimmers have significant performance benefits over conventional propeller driven vehicles. They are more efficient, have greater maneuverability, have lower signatures, and have lower risk of entanglement. In the FASt Lab, we aim to identify novel actuation, sensing, and control approaches that will enable bioinspired swimming robots to realize the advantages seen in nature. In support of this goal, we have developed a soft robotic fish (nicknamed Nebula) which consists of a flexible skeleton, muscle-like soft actuators (HASELs), and a streamlined silicone body. By exciting the muscle-like actuators, the robotic fish flexes its soft body and achieves the undulatory swimming motions used by biological fish; requiring no rigid joints or motors.
The soft robotic fish was designed with the help of numerical models that capture the bending of the fish’s body (structural dynamics), the interaction with the water (fluid-structure coupling), and the electrical input to the muscle-like actuators (electro-mechanical coupling). The picture shows Nebula held by members of the FASt Lab (top left), the internal components (bottom left), and experimentally captured deformations (right)
Develop structures that adapt to their environment